ServoreglerSiehe auch:
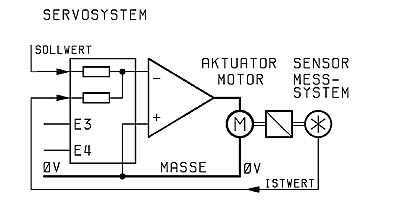
Servomotor Servoverstärker Als Servoregler wird die Steuerspannung mit dem Signal verglichen, welches ein Sensor der zu stabilisierenden Größe, z.B. einer Geschwindigkeit liefert.
 Hochdynamische Servoregelung
Hochdynamische Servoregelung
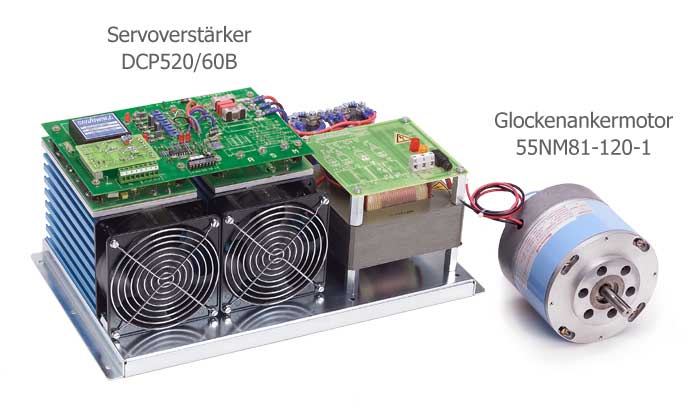
Das Ergebnis der hier vorgestellten Kombination aus Glockenankermotor und Linearverstärker ist ein Antriebssystem von extrem hoher Dynamik. Der Motor kann seine Drehzahl innerhalb einer Millisekunde von 0 auf 1000 min-1 verändern. Das System bietet sich überall dort an, wo kürzeste Taktzeiten sowie höchste Bearbeitungsgeschwindigkeit und Präzision gefordert sind.
Dieses Antriebssystem von Servowatt eignet sich somit für CNC-Maschinen, Spezial-Roboter und -Automaten, Hochgeschwindigkeits-Anwendungen usw. Der eisenlose Glockenanker bedeutet minimales Träg¬heitsmoment und minimale Induktivität und wird deshalb zu Recht auch als ,“der kürzeste Weg zwischen Elektronik und Mechanik" bezeichnet.
Der Linearverstärker
Der Leistungs-Operations-Verstärker enthält eine lineare Endstufe, Type DCP520/60B mit einem Dauerausgangsstrom von 12 A bei 50 V. Zum Beschleunigen und Bremsen lie¬fert er einen Impulsausgangstrom von 40 A über eine Zeit von 100 ms, entsprechend einem Impulsdrehmoment von 6,4 Nm. Die 500 W Endstufe für Vierquadranten-Be¬trieb ist dauerkurzschlusssicher ausgelegt. Sie enthält Hochleistungstransistoren im Verlustleistungsgesamtwert von 3000 W. Diese Technik ist industrieerprobt und arbei¬tet zuverlässig.
Die Hauptgründe für den Einsatz solcher Linear-Endstufen sind:
- Sie erzeugen keinerlei EM-Störungen. Der Antrieb kann somit in Präzisions-Maschinen und in besonderen Robotern eingesetzt werden, die empfindliche Messungen, z.B. im Ultraschallbereich, durchführen.
- Sie benötigen keine Drosseln am Ausgang. Die Ausgangsimpedanz ist nahezu Null und ist daher besonders geeignet, den Rotor optimal zu dämpfen. Die extrem kleine Induktivität von 0,24 mH erlaubt hohe
Stromanstiegsgeschwindigkeiten für schnellste Momentänderungen, Vorausset¬zung für hochdynamische Präzisionsantriebe mit großer Wellensteifigkeit.
- Sie arbeiten ohne Totzeit und sind nahezu beliebig schnell. Der Servoverstärker besitzt eine Leistungsbandbreite von mehr als 20 kHz, eine weitere Voraussetzung für einen hochdynamischen Positionierregler. Der ty¬pische Frequenzgang des Motors kann durch den Linearverstärker so gut kompensiert werden, dass ein schnelles und gleichzeitig aperiodisches Einschwingen (ohne Über- und Ausschwingen) möglich wird.
Der Glockenankermotor
Der 6-polige Glockenankermotor vom Typ 55NM81 mit extrem starken Alnico-V5 Magneten besitzt ein extrem kleines Massenträgheitsmoment von 71 x 10-6 kgm2. Bei einer max. Drehzahl von 2500 min-1 wurde für Anwendungen als Direktantrieb die Nenndrehzahl auf 1500 min-1 definiert. Das Nennmoment ohne Kühlung beträgt 1,8 Nm bei 12 A, mit Luft¬kühlung bewältigt dieser Motor ein Dauer¬moment bis zu 3 Nm bei 20 A. Als Impuls-Drehmoment erreicht dieser Motor 10 Nm mit einem Strom von 60 A. Die max. Winkelbeschleunigung ohne Last liegt bei 143.000 rad/s2. Diese Eigenschaften machen diesen Motor einzigartig für hochdynamische Anwendungen bis 1500 Watt Impulsleistung.
 Die Hauptgründe für den Einsatz dieser Motoren mit Glockenanker sind:
Die Hauptgründe für den Einsatz dieser Motoren mit Glockenanker sind:
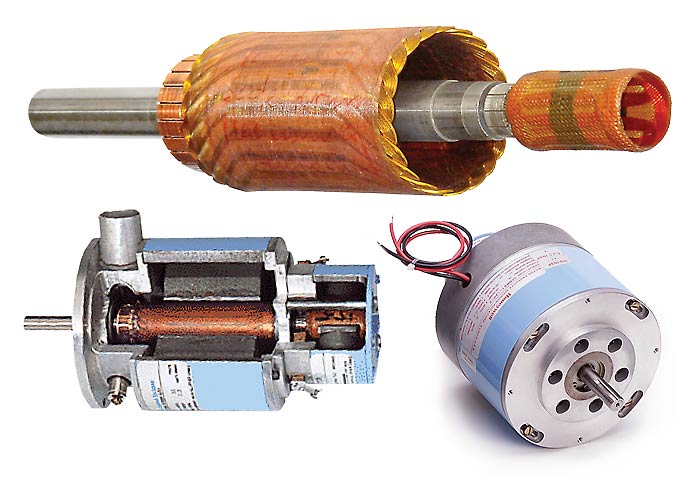
- Der Rotor ist als selbsttragende Kupferspule gewickelt (Bild 2). Kein Eisen im Ro¬tor bedeutet kleines Trägheitsmoment und gleichzeitig eine kleine Induktivität sowie absolute Freiheit von Rastmoment, und Bremsmomente bedingt durch Ummagnetisierungsverluste. Eine weitere wichtige Eigenschaft besteht darin, daß die Drehmomentkonstante eine extrem kleine Welligkeit aufweist. Das abgegebene Drehmoment ist somit unabhängig sowohl von der Lage als auch von der jeweiligen Geschwindigkeit. Diese Eigenschaft wird u.a. zur Untersuchung der statischen und dynamischen Eigenschaften anderer Motoren in Prüfständen verwendet.
- Die angekoppelte Tachometer-Spule mit einem Trägheitsmoment von nur 30*10-6 lie¬fert einen absolut verzögerungsfreien Ge¬schwindigkeits-Istwert. Die Tacho-Motor-Torsionsresonanzfrequenz wurde durch kon¬struktive Maßnahmen auf über 6 kHz angehoben. Die unverzögerte Messwert der Ausgangsspannung wird regelungstechnisch für eine möglichst hohe interne Regelverstärkung verwendet, die wiederum in einer hohen Steifigkeit und Leistungsbandbreite resultiert. Das sind die herausragenden Eigenschaften dieses Motors.
- Da im Tacho kein Eisen ummagnetisiert wird, arbeitet dieser frei von unerwünschten Effekten wie Hysterese. Die Bürsten sind doppelt und mit einem Winkelversatz ausge¬führt, d.h. für beide Drehrichtungen optimiert. Der Motor kann daher makellos sauber arbeiten, auch bei schleichenden Drehzahlen. Genau diese Details aber ermöglichen erst ein Arbeiten mit sehr hoher Proportionalverstärkung, wodurch die Welle des Antriebs beson¬ders steif, bzw. unempfindlich gegen Stör¬momente wird. Der praktisch nutzbare Geschwindigkeitsregelbereich liegt bei über 10.000 : 1. Alle Eigenschaften zusammen er¬geben aufeinander abgestimmt einen Antrieb für höchste Anforderungen an Präzision und Dynamik.
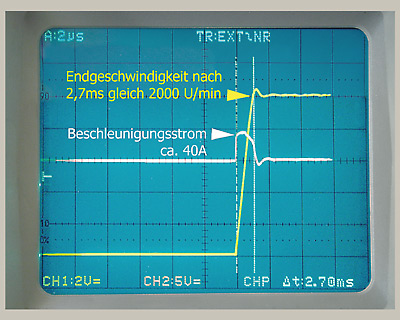
Sprungantwort der Drehzahl für Drehzahländerungen um 2.000U/min
Dieses aperiodische Einschwingen zeigt im Vergleich mit dem Einschwingverhalten anderer Antriebe, warum dieses Antriebssystem auch neben bürstenlosen Systemen immer eine Daseinsberechtigung haben wird: Es ist bezüglich Dynamik und Dämpfung aufgrund seiner physikalischen Parameter anderen Systemen überlegen.
Das System der selbstragenden Kupferspule im statischen Magnetfeld ist erstens in der Dynamik unübertroffen und zweitens umschließt diese Spule kein Eisen und ist somit extrem induktivitätsarm. Das mustergültige Einschwingverhalten beweist die extreme Leistungsbandbreite dieses Systems. Die rotierende Spule im statischen Magnetfeld wird physikalisch bezüglich Verluste, Rastmomentfreiheit und kleiner Induktivität immer der Umkehrung überlegen sein, bestehend aus rotierenden Magneten im Spalt. Zu Recht hat die Schweizer Firma ESCAP vor vielen Jahren den Slogan geprägt:
“ Der kürzeste Weg zwischen Mechanik und Elektronik “. Die richtige Ansteuerung
Die richtige Ansteuerung
Bei der Frage nach der richtigen Ansteuerung für diesen Antrieb stellt man fest, dass die Abtastzeit einer üblichen Achssteuerung von etwa 1 bis 4 ms sicher viel zu langsam ist, um seine Dynamik voll zu nutzen. Schon brauchbarer wäre eine Abtastzeit von kleiner 0,5 ms. Heute arbeiten moderne Positioniersteuerungen mit 50 bis 500 Mikrosekunden.
Nicht vergessen sollte man analoge Positionierungen. Wenn diese richtig ausgelegt werden, kann nicht nur schnell, sondern vor allem stufenlos positioniert werden. Mit modernen Potentiometern und induktiven Gebern, auch kontaktlos, lassen sich in der Praxis für kleine Wege bis weit über 500 Positionierungen pro Sekunde realisieren. Nicht wenige der schnellsten und präzisesten Anwendungen funktionieren auf diesem Prinzip.
Anwendungen
Der Antrieb eignet sich insbesondere als Zustellachse in Hochleistungs-Präzisionsmaschinen die im Mü- oder sub-Mü-Bereich arbeiten, wie zum Beispiel: Schleifmaschinen für Präzisionsteile, für Verzahnungen und Schrägverzahnungen, Präzisionsdreh¬maschinen, Drehmaschinen für unrunde Teile (Vibrationsdrehmaschinen) usw.
Auch für sehr schnelle Fertigungseinrichtungen und spezielle Roboter ist der Antrieb geeignet, wie z.B. XY-Koordinatentische, Bestückungs- und Montageautomaten für Kleinteile, Sortierautomaten für Halbleiter, Folien- und Papierverarbeitungsmaschinen, Schnelldrucker bis zu 2500 Zeilen pro Minute, Hochgeschwindigkeits-Wickelautomaten und Laser-Trimmautomaten für Schichtwiderstände.
Aufgrund der kleinen Drehmoment-Welligkeit des Motors eignet er sich auch als trägheitsarmer Drehmomenterzeuger in Prüfeinrichtungen (Linearität besser als 3%). Somit kann der Antrieb auch sehr gut auch in Motorprüfständen eingesetzt werden, wobei das Drehmoment positiv oder negativ über den Strom stetig verändert wird. Auch zur Erzeugung von Impuls-Störmomenten können verschiedene Kurvenformen wie z.B. rechteckig, dreieckig, sinusförmig, frei programmierbar etc. fast trägheitslos erzeugt werden. Für diesen Fall arbeitet der 4Q-Regler beschaltet als bipolare Stromquelle.
In High-Tech-Anwendungen wird der Verstär¬ker DCP 520/60 eingesetzt, um moderne bürsten¬lose Linearmotoren und Aktuatoren anzutreiben. Hiermit lässt sich z.B. der Antrieb eines Linear-Aktuators Bild 4) mit 200 N und mehr für viele neue hochdynamischen Ap¬plikationen realisieren. Hierbei ist wieder hervorzuheben, dass mit einer hohen Beschleunigung und aperiodischer Dämpfung eine hohe Genauigkeit bis in den Nano-Bereich erreicht wird.
